<strike id="wqgeu"></strike>
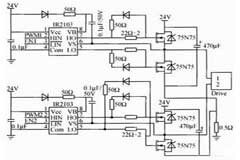
隨著人工成本的不斷升高,用機器人代替人力去做一些重復性的高強度的勞動是現代機器人研究的一個重要方向。搬運機器人在導航尋跡中,需要后輪驅動電機和前輪舵機的協調工作。搬運機器人電機驅動有其特殊的應用要求,對電機的動態性能要求較高,能在任意時刻到達控制需要的指定位置并且使舵機停止在任意... (來源:技術文章頻道)
STM32F107 搬運機器人 電機控制 2021-8-4 14:19
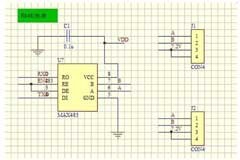
本次所設計的機器人是由新華龍C8051F310控制,兩條人形機械腿由十二個舵機組成由三塊電路板控制。且三塊電路板由三名組員分別設計完成。其中一塊主控板控制兩塊從板,通過485總線進行通信,從而實現機械腿的協調動作。一. 電源電路 電源芯片采用AZ1084和LM1117。其中AZ1084... (來源:技術文章頻道)
機器人控制電路 2021-3-8 14:25
<rt id="wuoee"></rt>
<center id="wuoee"></center>
 搜索到2條【電機轉速控制】相關的技術文章。
搜索到2條【電機轉速控制】相關的技術文章。

 搜索到2條【電機轉速控制】相關的技術文章。
搜索到2條【電機轉速控制】相關的技術文章。
 查看關鍵詞的分類頻道
查看關鍵詞的分類頻道



